
|
|
1.IntroductionAccording to most studies of human vision, the first step in visual perception is determining whether there are objects in front of the observer: where they are and how many there are. This step (visual function) is called figure-ground organization (FGO).1 The computer vision community refers to this problem as object discovery. As with all natural visual functions of human observers, FGO operates in three-dimensional (3-D) space, as opposed to the two-dimensional (2-D) retinal image. It follows that it is natural to think about visual mechanisms underlying FGO as based on 3-D operations. However, the fact that the input to the visual system is one or more 2-D retinal images encouraged previous researchers to look for a theory of FGO based on 2-D operations. This is how the human vision community studied FGO. Consider the prototypical example of Edgar Rubin’s vase-faces stimulus.2 In this 2-D stimulus, there are two possible interpretations depending on which region is perceived as a “figure” as opposed to the “ground.” Similar bistable stimuli have been used during the last several dozen years of FGO research in human vision.3,4 This research provided a large body of results, but few theories and computational models. Furthermore, the proposed models are usually not suitable for real retinal or camera images representing 3-D scenes. This paper breaks with this tradition and looks for 3-D operations that can establish the correct 3-D FGO. Once we assume that FGO refers to the 3-D percept, we have to decide how the transition from the 2-D image to the 3-D percept is made. Here, we follow the paradigm of inverse problems introduced to vision by Poggio et al.5 According to this paradigm, inferences about 3-D scenes, based on one or more 2-D images, must involve a priori constraints (aka priors). Without constraints, the 3-D inference problem is ill-posed, because there are infinitely many possible 3-D interpretations that are consistent with any given 2-D input. The a priori constraints are imposed on the family of possible interpretations resulting in a unique and accurate solution. We have already shown how this works with 3-D shape perception.6 Specifically, in 3-D shape recovery, 3-D symmetry is the natural prior. This makes sense because most, if not all, natural objects are symmetrical. There is empirical evidence showing that the human visual system relies on the 3-D symmetry constraint.7 The symmetry constraint is responsible for our veridical perception of 3-D shapes. By “veridical,” we mean that we see shapes the way they are out there. In this paper, we attempt to extend the operation of a 3-D symmetry prior to FGO. Specifically, our theory of FGO is based on the following observation: almost all natural 3-D objects are characterized by one or more types of symmetry, whereas a 3-D configuration of unrelated objects is, itself, almost never symmetrical. In our theory, the detection of symmetries in the 3-D scene is equivalent to the detection of objects. There are as many objects in the scene as there are symmetries. Furthermore, the parameters of the symmetries (positions and orientations of the symmetry planes) provide information about the position and orientation of the objects in the 3-D scene. Section 1.1 presents a brief overview of the symmetry prior. 1.1.The Generality of the Symmetry PriorAssuming that objects are mirror symmetric may, at first, seem overly restrictive. Most real-world scenes, however, are composed of 3-D symmetric objects standing upright on a perceptually flat surface, such as the floor or simply the ground.6,8 Mirror-symmetric objects themselves tend to have a natural Cartesian coordinate system: front, back, left, right, top, and bottom. In a systematic treatment of spatial terms in language, Levinson referred to these types of object-centric directions as the “intrinsic reference frame.”9 Cross-cultural linguistic analysis by Talmy further suggests that these object-centric directions are represented in “mentalese”—the native representation of mental information.10 One of us argued that such a coordinate system exists as a consequence of purely physical properties of the world that we evolved in Ref. 6. For example, it would be very hard for an animal to be physically stable and to move around if it were not bilaterally symmetric. DNA evidence in the field of molecular phylogenetics suggests that the first mirror symmetric organisms—the so called “bilateria”—evolved more than half a billion years ago,11 and now constitute the vast majority of animal phyla, including the arthropods (e.g., insects and arachnids) and the chordates: animals with a hollow nerve chord running down their backs, e.g., sharks, birds, cats, fish, and humans. The few animals that are not bilateria, such as sponges and jellyfish, still show other forms of symmetry, such as radial symmetry. Symmetry is, therefore, a natural and general prior and it should be used in 3-D vision. The symmetry plane is usually orthogonal to the ground because that provides the best support against gravity. The cross product of the ground–normal, up–down, (approximating the direction of gravity) and the normal of the symmetry plane, left–right gives the third intrinsic direction: front-back. Psychophysical evidence clearly shows that the human visual system makes use of the symmetry prior in 3-D shape recovery.7 Symmetry is also important in “shape constancy.” Shape constancy refers to the phenomenon in which the perceived shape of an object is constant despite changes in the shape of the retinal image caused by changes in the 3-D viewing direction. Experimental results on the role of symmetry in shape constancy and shape recovery in humans suggest that symmetry is an essential characteristic of shape.8,12 1.2.Related ResearchSymmetry has already played an important role in computer vision research. This goes back at least to a landmark 1978 publication by Marr and Nishihara,13 who emphasized the importance of 3-D symmetrical shape parts based on Binford’s14 generalized cones. The presence of symmetry in a 3-D object allows derivation of invariants of a 3-D to 2-D projection (e.g., Refs. 1516.–17). 3-D symmetries also facilitate 3-D recovery from a single 2-D image using multiview geometry.18 There have been some attempts to use 2-D, as opposed to 3-D symmetries in image segmentation,19 and image understanding.20 However, the use of 2-D symmetries in computer vision faces fundamental difficulties simply because a 2-D camera image of a 3-D symmetrical object is, itself, almost never symmetrical. Before a 3-D symmetry prior is used to recover 3-D shapes, 3-D symmetry correspondence must be solved in the camera image, which itself is 2-D and almost never symmetrical. Solving for symmetry correspondence has been tried for surfaces of revolution, which are characterized by rotational symmetry21–23 as well as for mirror-symmetrical polyhedral objects, where edge features are compared with respect to 2-D affine similarities (Refs. 2425.–26). The inherent difficulty of the 3-D symmetry correspondence problem in 2-D images has resulted in incremental successes, where the proposed methods work only for special cases such as nearly degenerate views (e.g., Ref. 25). The fact that the projection of a 3-D mirror symmetric object into 2-D rarely produces a symmetric image is only one part of the difficulty in solving for symmetry correspondence. An additional problem is that a camera image usually contains multiple objects. So, one must solve FGO before symmetry is applied to individual objects. As pointed out in the beginning of this paper, FGO goes by the name of object discovery in the computer vision community. The state of the art of object discovery in real images makes extensive use of machine learning, and relies exclusively on 2-D features (for review, see Ref. 27). The much harder problem of unsupervised object discovery has received comparatively little attention. In unsupervised object discovery, an algorithm analyzes an image to locate and label previously unseen objects. One approach is to discover the general characteristics of object categories from regularities in large sets of unlabeled training data. Those categories are then utilized to discover and locate objects in a set of testing images (e.g., see Refs. 2829.30.31.–32). This problem is typically considered so hard that most methods rely on at least some form of weak supervision. For example, Kim and Torralba33 attempted to locate objects [regions of interest (ROI)] without training data; however, a small set of initial exemplar ROIs must still be supplied. While certainly acceptable in the computer vision community, the use of testing and training data is probably unimportant in human vision.6 Human observers can detect and recover unfamiliar 3-D shapes from a single 2-D image, and recognize a 3-D shape from a novel viewing direction.6 Surely some learning can occur in human vision; an individual can learn and remember what an object looks like, but learning does not seem to be necessary for detecting 3-D objects and recovering their shapes. Our approach aims at emulating what human observers do: our model does not use any training data, and there is no attempt to learn any category information, or regularities between exemplars. The present approach is not only unsupervised, but also uses an informative and generally applicable prior, 3-D symmetry, in establishing FGO. Object discovery is more effective when 3-D points are available (e.g., from stereo images). In such cases, a typical approach for object discovery is cluster analysis. -means remains one of the most widely used clustering algorithms even though roughly 50 years have passed since it was independently discovered in various scientific fields (for a historical review, see Ref. 34). Most clustering algorithms require, however, a priori knowledge of the number of clusters (i.e., objects in the scene), and these algorithms rely on some form of distance metric. Automatically determining the number of clusters is itself ill-posed, and often requires separate criteria for what is the “most meaningful” number of clusters. Specifying what is meaningful in a given application is a key problem, which comes in addition to an over-reliance on uninformative priors, such as density and distance metrics. Our approach is to approximate the ill-posed clustering problem with a well-posed formulation based on 3-D symmetry. Our algorithm uses 3-D data from a binocular camera; however, it is the incorporation of a 3-D symmetry prior that transforms clustering (object discovery) from an ill-posed problem into a well-posed one. The use of 3-D symmetry can, at least in principle, lead to near perfect performance in FGO—the level of performance that characterizes human vision in everyday life. 2.Problem FormulationThere is no known way to achieve near-human performance in unsupervised object detection. Some definition of “object” and “background” is required for such an algorithm. In previous research, this definition usually is implicit in the clustering of low-level 2-D features, such as interest points, in a training set. In this work, we use the following psychologically motivated operational definition of an object to formulate the object detection problem: Definition 2.1An object’s defining quality is its 3-D shape, where shape is defined as a set of mirror symmetric curves with respect to a common symmetry plane. Under this definition, polyhedral objects can be detected from a scene by locating one or more symmetry planes and then finding pairs of points that are mirror symmetric with respect to a particular symmetry plane. There is no known general purpose algorithm for finding 3-D mirror symmetric curves in single 2-D camera images; however, it is possible to simplify the symmetry correspondence problem by pairing it with the binocular correspondence problem, because the epipolar geometry of each provides nonoverlapping constraints on the solution space. In effect, we simultaneously disambiguate each correspondence problem by using the epipolar geometry of the other. We further simplify the problem by assuming that the objects’ symmetry planes are orthogonal to the ground. This is typical for most objects, which must resist gravity when standing on a flat surface. This additional assumption can, however, be removed without changing how the algorithm works. 2.1.NotationWe use upper-case bold letters, e.g., , to denote the coordinates of 3-D points. Lower-case bold letters, e.g., , denote the projection of a 3-D point onto the image plane of a camera. Subscripts are added to lower-case bold letters to identify a particular camera. For example, the projection of in the first camera is , and in the second camera, . A star superscript is used to denote the homogeneous versions of these points. Therefore, is the homogeneous representation of the 3-D point , and is the homogeneous representation of the 2-D point . 2.2.Stereo CorrespondenceWe use a pinhole camera model for each of a pair of calibrated cameras with identical intrinsic parameters, and with neither skew nor radial distortion. The center of camera 1 is located at the origin of the world coordinate system, , and the center of camera 2 lies on the -axis at , where is the distance between the two cameras. The principal rays of the cameras are parallel and pointing down the negative -axis. Stereo rectification is unnecessary under these assumptions, and we can define the epipolar geometry for the two-view camera system according to the following definition: 2.3.Symmetry CorrespondenceA pair of 3-D points, and are mirror symmetric about a “plane of symmetry,” , if the plane of symmetry bisects a line segment connecting these two points. This, in turn, implies the following two equations: (1) the two points are equidistant from the symmetry plane and (2) the line joining the two points is parallel to the normal of the symmetry plane We refer to the normal of the symmetry plane as the “direction of symmetry.” Without loss of generality, assume that is a unit normal. In this case, is scaled to the units of the coordinate system.The plane of symmetry defines its own epipolar geometry as given in Definition 2.3.1. Definition 2.3.1The vanishing point of the 3-D symmetry lines is isomorphic with the direction of symmetry. Let be a direction of symmetry for an object. When extended to infinity, the projection of all 3-D lines parallel to meet at a vanishing point . The vanishing point in Definition 2.3.1 is commonly referred to as the epipole of the symmetry plane, and the lines passing through the epipole as the epipolar lines. To avoid a conflict of terminology between the binocular and mirror-symmetric epipolar geometries, we simply refer to the symmetry plane’s epipole as the vanishing point, and the epipolar lines as the pencil of lines through the vanishing point. This pencil of lines is used to constrain symmetry correspondence in a single image, as described in Property 2.3.1. Property 2.3.1If and are images of 3-D points and symmetric about with direction of symmetry , then and are colinear with the vanishing point , which is defined by the direction of symmetry.35 2.4.Combined CorrespondencesEach of the two correspondence problems involves a pair of image points that must obey the geometrical constraints of the specified problem. In the binocular correspondence problem, according to Definition 2.2.1, pairs of points, one from each image, must have the same -coordinate. In the symmetry correspondence problem, according to Definition 2.3.1, pairs of points from a single image must be colinear with the vanishing point defined by the direction of symmetry. These two problems are combined by choosing two points, and from the first image, and two points and from the second image. A set of four such points is called a “two-view mirror-symmetric quadruple,” or simply quadruple for short. Figure 1 shows such a quadruple and the constraints that they obey. All objects under Definition 2.1 are composed of these quadruples. Fig. 1A two-view mirror-symmetric quadruple is a set of four 2-D points that obey four constraints. Pairs of points and obey the epipolar constraint in Definition 2.2.1: their -coordinates are the same. Points from image 1 and from image 2 obey Definition 2.3.1: they are colinear with the vanishing point. Note that the vanishing point is view-invariant across both images, and implied by the quadruple. It is not part of the quadruple.  Note that because there is no rotation between the two cameras in our simplified two-view geometry, the direction of symmetry is identical with respect to both cameras, and thus so is the vanishing point. 2.5.3-D Reconstruction Based on SymmetryGiven a vanishing point , it is possible to reconstruct the 3-D locations of points and from their images and . Figure 2 shows the geometry of this situation. The vanishing point resides on the image plane and has 3-D coordinates . Without loss of generality, assume that the camera center is at the origin (0,0,0). In this case, is, itself, the direction of symmetry. This means that the camera image of all the points on 3-D rays parallel to will form lines that intersect at .36 Fig. 2The imaged points and , along with the vanishing point define the location of 3-D points and up to scale. The symmetry plane can be written as , where locates the plane, and thus the point , which lies on the plane. The vector is parallel to the direction of symmetry, creating a triangle that constrains the ratio of the lengths of the vectors and , allowing for 3-D reconstruction, as specified by Eqs. (3)–(5).  The vector is also the normal to the plane of symmetry that divides points and at midpoint . Therefore, the plane of symmetry can be written as , where is a free parameter that locates the plane of symmetry and scales the size of the reconstructed object. By construction, the points and must lie on rays emanating from the camera center through the imaged points and . Given the intrinsic camera matrix , let , and be unit vectors in that intersect the image plane at the desired points. We can then rewrite and according to the following equation: Let be the unit vector that intersects the image plane at the vanishing point . Now, let be the angle between and , and be the angle between and . Then, the ratio of to is given by the following equation: This can be seen by construction. Referring to Fig. 2, let be the distance from the origin, to the line through and . Then by definition, , and . Taking the ratio gives Eq. (4).To solve for and , all that remains is to find the distance to one of the two points, and then substitute into Eq. (4) for the other. Note that and are equidistant to the symmetry plane, giving . Substituting into Eqs. (3) and (4) gives the following equation: 2.6.Using the Floor PriorEvery quadruple is consistent with a vanishing point as follows: find the point of intersection between the line going through , and the line going through . By definition, this point is colinear with both pairs of points, and, therefore, can be chosen provisionally as a vanishing point. Noting that, in homogeneous coordinates, the cross product of two points is the line going through them, and the cross product of two lines is the point of intersection, we have the equation for the vanishing point As shown in Eq. (5), a vanishing point and a pair of points from one image are sufficient for reconstruction. Although subject to more error from image quantization, triangulation36 can also be used to locate 3-D points and . The floor prior can be used to define a restricted set of consistent quadruples. As previously pointed out, if symmetrical objects are standing on a flat surface, or floor, then the direction of symmetry will be in the one-dimensional complementary subspace orthogonal to the floor normal. The projection of this subspace is the “horizon line” and it is isomorphic to the floor plane’s normal. With this prior, it is possible to determine the vanishing point for a pair of mirror symmetric points and in a single image. Let be the normal to the floor, which is suggestive of the direction of gravity. defines a line in homogeneous coordinates in the standard way (the intersection of the image plane with the plane parallel to the floor, which passes through the camera center), and is called the horizon line. The vanishing point must be the point of intersection between the horizon line and the line passing through points and Note that there is a degenerate case when , , and the camera center lie on a plane parallel to the floor plane. In this situation, , and the vanishing point is underdetermined.We can now determine if a two-view mirror-symmetric quadruple has a vanishing point that is consistent with an object standing on the floor. The estimate of from Eq. (6) can entail substantial quantization error if pixels and , or and are close to each other. For this reason, the vanishing point is estimated from the image, where and are most distant, and a colinearity test is used to determine if the quadruple is consistent with the horizon defined by the floor normal. Definition 2.6.1A two-view mirror symmetric quadruple is consistent with the floor prior if there exists a vanishing point on the horizon line (defined by the normal to the floor) that is colinear both with , , and with , . A pair of points is considered colinear with the vanishing point if a line through the vanishing point exists such that the minimum point-line distance for both points is less than a threshold. 3.System ArchitectureInput is a pair of stereo gray-scale images captured from a Point Grey Bumbleebee2® two-view camera system. A disparity map is calculated using the “sum of absolute differences,” according to a propriety algorithm in the Triclops® 2.5 SDK, as published by Point Grey. The right image is used as the reference image for the disparity map. The input images are smoothed with a Gaussian kernel before applying the canny operator with an adaptive threshold for hysteresis. The high threshold is automatically set to the average of the orientation magnitude at each pixel, as produced by the Sobel operators. The low threshold is automatically set to be 0.4 times the high threshold. A sparse disparity map is then produced by taking those disparity values from the disparity map, which also register an edge in the edge maps for both images—within a pixel of error to account for quantization effects. The sparse disparity map gives corresponding pairs according to texture in the input image, but along identified edges in the image. 3.1.Estimating the FloorTriangulation36 is used to generate a point cloud from the disparity values. RANSAC is applied to find a 3-D plane hypothesis that covers the maximal number of points, following a procedure outlined in Ref. 37. The normal to this plane is the estimate for . The floor points are then removed from analysis. The remaining sections below consider only nonfloor points that are on identified edges in the image. 3.2.Finding Object HypothesesTwo-view mirror-symmetric quadruples are defined as pairs of disparity map values from the sparse disparity map. A region of interest for symmetry correspondence is used to avoid searching through pairs of disparity values. The set of floor-consistent quadruples, as per Definition 2.6.1, is calculated from all pairs of disparity map values within the region of interest. All detected objects are subsets of these floor-consistent quadruples. Segmentation of the scene proceeds by finding symmetry planes that produce spatially local clusters of quadruples—or objects according to Definition 2.1. A single quadruple can be used to estimate all parameters of an object’s symmetry plane, . the direction of symmetry is calculated as per Eq. (7). A point on the symmetry plane is required to estimate . In this case, and are estimated using triangulation, and is obtained as 3.3.Finding Inliers for a HypothesisIt is possible to find all quadruple “inliers” for a given symmetry plane hypothesis by examining the reprojection error of the four points in each quadruple as follows. First reconstruct 3-D points and from and by using the symmetry prior [Eq. (5)]. These 3-D points are then reprojected into both image planes, as per Eqs. (9) and (10), where is the distance between the two camera centers, and is the reprojection of in the first image plane and in the second image plane The reprojection error of both reconstructed 3-D points is then given by the following equation: If the reprojection error of both and is below a specified threshold, then the quadruple is considered an inlier to the object hypothesis. An additional parameter, the “maximum object size” is used to alleviate noise from spatially distant quadruples that happen to be inliers to the object hypothesis. Recall that a point on the symmetry plane is calculated to get the parameter in Eq. (8). A quadruple is considered an inlier only if both and are within a specified distance to this initial point on the symmetry plane. This specified distance sets the expected maximum size of an object. Note that if the symmetric reconstruction [Eq. (5)] is performed on and , then , and , and the reprojection error for these points is zero. However, points and will be different from those computed from binocular disparities via triangulation. In particular, the distances among , , and the camera center are noisy in triangulation because of a combination of pixelation and the large ratio of the reconstructed depth to the distance between the camera centers. Equation (5) does not have this defect, and corrects the binocular reconstruction. Put differently, 3-D symmetry allows for subpixel binocular reconstruction. 3.4.Nonlinear Optimization of HypothesesEach symmetry plane has four parameters , but only two degrees of freedom. The direction of symmetry is a unit normal, but it has only one degree of freedom because it must be orthogonal to the floor normal, as specified in Eq. (7). Nelder–Mead38 is then used over this 2-D subspace to find the symmetry plane parameters that maximize the number of quadruple inliers. 3.5.Choosing Nonoverlapping HypothesesThe steps outlined above generate a single object hypothesis. In a procedure similar to RANSAC, we can create an arbitrary number of hypotheses. (The precise number is given in Sec. 3.6.) Many of these hypotheses overlap spatially and must be discarded; however, choosing a maximal nonoverlapping subset of object hypotheses is NP-hard. “Branch and bound”39 was used to accomplish this step. Let be the set of initial object hypotheses generated according to the steps outlined above. Let be the number of quadruples in a given object hypothesis . Then, branch and bound is used to find the optimal set of hypotheses as described by An important detail is calculating the spatial intersection between two object hypotheses: . Using the normal to the floor plane, we calculated the orthographic projection of each hypothesis onto the floor, and then found the 2-D convex hull for the projected points. This convex hull is a 2-D polygon representing the image of the object hypothesis on the floor. Two object hypotheses were considered overlapping if their 2-D hulls overlapped.3.6.Algorithm ParametersTable 1 lists the parameters used in the clustering algorithm. Object size was set to be about 50% larger than the expected size of the largest object in clustering. Changing the number of object hypotheses gives a speed-accuracy trade-off, as described further in Sec. 4.4. Other parameters were chosen based on the algorithm’s features. The results are not sensitive to the particular choices. Table 1Algorithm Parameters.
4.Experimental ResultsThe novelty of our approach makes it difficult to compare our algorithm to existing techniques. Unsupervised object localization is a form of unsupervised clustering, which our algorithm performs using symmetry as an informative prior. Therefore, we considered it appropriate to compare our results to -means because of its long history, and the typical usage of distance metrics for most data clustering techniques. Thus, we tested mirror symmetry clustering—as an informative prior for object localization—against -means, a benchmark method based solely on spatial clustering. A corpus was acquired to perform a comparison. One hundred and eighty pairs of grayscale images were captured under normal indoor lighting conditions using a Point Grey Bumblebee2® stereo camera with a 12-cm baseline, and a 66-deg horizontal field of view. Five to ten objects were featured in each scene (a room), where the objects were mostly polyhedral: toys, childrens furniture, a pram, a vacuum cleaner, and a tripod. Seventy five images featured a person. The floor was covered by uniformly colored carpet. As described in Sec. 3.1, our symmetry-based approach to object localization relies on estimating the plane of the floor. For this estimate to be reliable, there must be sufficient samples of floor patches available in the images. Since the points on the floor are removed from further analysis, the type of texture on the floor is unimportant. Furthermore, our approach relies on binocular disparity information to solve the symmetry correspondence problem, as discussed in Sec. 2.4. When the objects are too far from the camera, then the stereo system degenerates to single view geometry. For example, an object 0.3-m deep, placed 4 m from our stereo camera setup, has only 2 pixels of disparity difference between front and back. Therefore, when constructing the corpus, objects were placed between 1.5 and 4.5 m from the stereo camera. 2-D ground truth was specified as a set of bounding rectangles in the left-camera-image of each pair of images. Each bounding rectangle was drawn by hand around the regions containing the individual exemplars. The rectangles were axis-aligned such that they have horizontal and vertical edges. 4.1.-MeansSince mirror symmetry is calculated in 3-D, we applied -means clustering to an unstructured 3-D point-cloud. A disparity map was calculated as per Sec. 3. The symmetry-based algorithm considered only binocular correspondences that coincided with the canny edge maps generated from each image. This sparse point cloud was used to reduce the search space for symmetrical correspondences; however, it also reduces noise from texture-based artifacts typical in stereo reconstructions. In order to do a fair comparison, we restricted the “-means” point cloud to the same set of 3-D points that were used to generate two-view mirror symmetry quadruples. The method described by Caliński and Harabasz40 was used to automatically determine the value of : the number of objects in the image. Once clusters were determined, the 3-D points were projected back to the image plane of the left camera, and bounding rectangles with horizontal and vertical sides were calculated. 4.2.Comparison FunctionBounding rectangles were compared as follows. Intersection-over-union41 [Eq. (13)] was used to calculate the best matches between all rectangles representing an algorithm’s output and all ground truth rectangles. The best matching pair of rectangles was paired together first, and then removed from analysis. This procedure was repeated recursively until all ground truth rectangles were matched We averaged the scores for each image. Our method for scoring each image does not produce a penalty for estimating too many objects; however, if the algorithm estimated that there were too few objects, then some ground truth rectangles were scored as zero. As will be seen below, this fact favored, on average, -means clustering. It follows that the observed superiority of our method in this analysis is a conservative estimate. We also calculated statistics using the following labeling procedure. All rectangles were labeled as either true positives (TP) or false positives (FP), where a TP was recorded if intersection-over-union with a ground-truth rectangle was greater than 0.5. If a ground truth rectangle was not paired with a TP object hypothesis, then it was labeled as a false negative (FN). is then calculated according to the following equation: 4.3.-Means Versus Symmetry-Based Object LocalizationBounding rectangles for three representative examples are shown in Fig. 3. In Fig. 4, we show a histogram of the ratios of mean scores, as defined by Eq. (13), for our algorithm and for -means across all 180 scenes. Ratios greater than 1 imply that our algorithm performed better. Fig. 3Representative results comparing -means (left column) to symmetry-based object localization (right column). 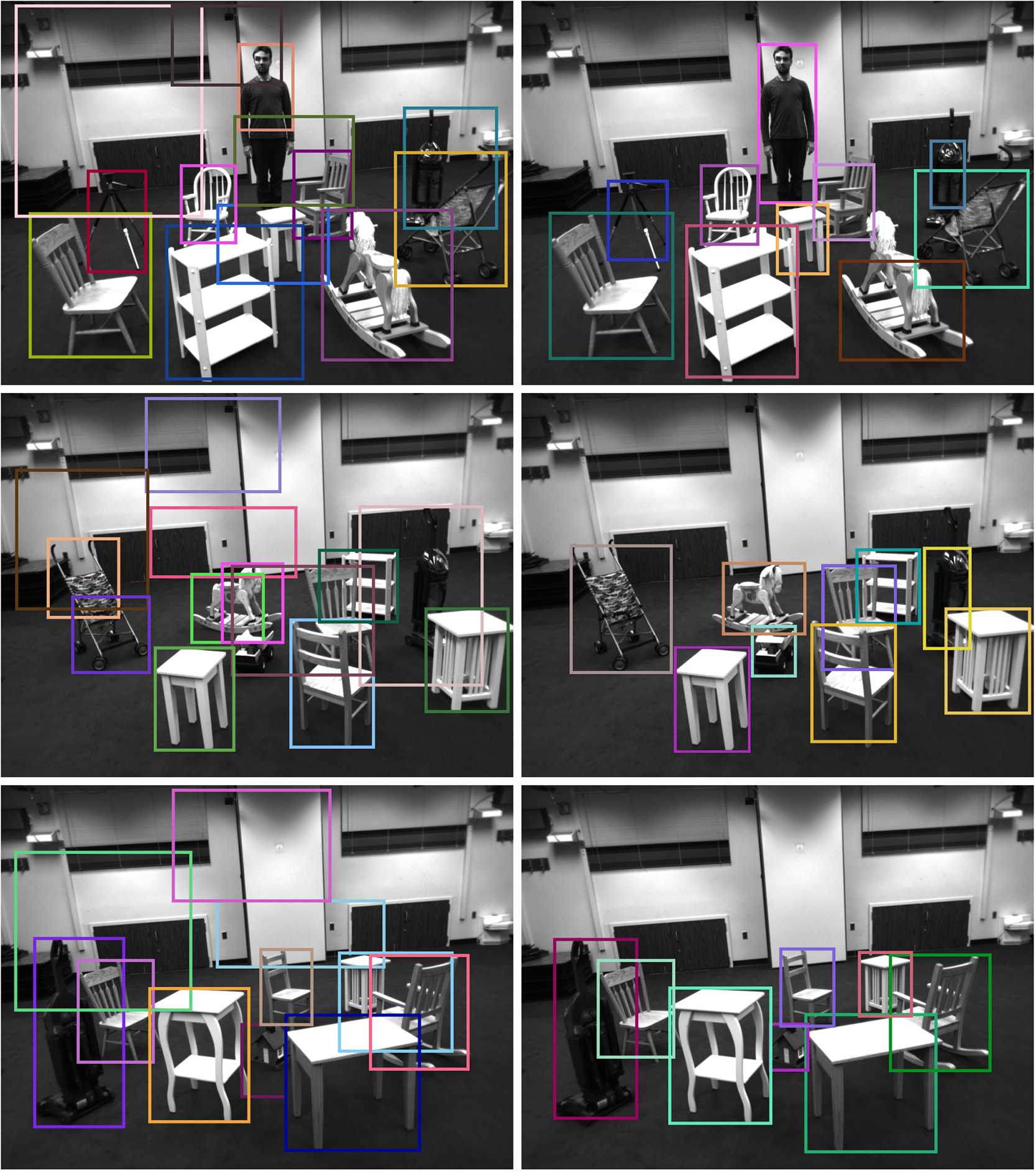 Fig. 4Histogram of the ratio of mean intersection-over-union of bounding rectangles for each image. A ratio of 1.0 implies that SBC and -means performed equally well. Greater than 1.0 implies that SBC performed better.  Most ratios are greater than 1 indicating that our algorithm did perform better. We want to point out, however, that -means also performed reasonably well. This good performance is partly the result of eliminating spurious 3-D points in the front-end of our method, where we reconstruct only those 3-D points that represent binocular correspondences for both texture patches and edges (see Sec. 4.1). However, since the -means method relies solely on a distance metric, it seems to produce localizations that bleed over multiple scene objects when the objects are close together in 3-D. The symmetry-based method is much more robust in this circumstance. Both methods work well if the objects are far apart from each other in 3-D, even if one occludes the other in the camera images. The symmetry-based clustering (SBC) also performed better than Caliński and Harabasz’s method for determining the number of clusters. A comparison of the number of clusters detected between the two methods is given in Fig. 5. In this figure, we see that the Caliński and Harabasz heuristic tends to overestimate the numbers of objects (clusters) in the scenes. In contrast, SBC tends to be more accurate, and to slightly underestimate the numbers of objects in the scenes. Fig. 5The difference between the number of clusters detected by SBC, or by Caliński and Harabasz’s method for determining in -means, and the actual number of objects. Zero error implies that a method detected the correct number of clusters (objects). Positive error means that a method detected more clusters than there were objects in the scene. Caliński and Harabasz show a bias toward reporting too many objects under the experimental conditions. SBC is both more accurate, and slightly conservative, in its estimates of numbers of objects.  Note that, as described in Sec. 4, the corpus was designed with mostly polyhedral objects placed close enough to the stereo camera such that symmetry correspondence could be solved from disparity information. Furthermore, as described in Sec. 3.1, we constrained the symmetry plane to be orthogonal to the estimated floor plane—and the floor was clearly visible in every corpus image. The results reflect these controlled experimental conditions. In the conclusion section, we discuss how to relax these constraints to develop a general purpose approach to symmetry-based object localization. 4.4.Runtime Performance of Symmetry-Based Object LocalizationRuntime performance for the symmetry-based technique was dominated by the final branch and bound step. After generating multiple overlapping object hypotheses, branch and bound was used to find a maximal set of nonoverlapping objects, as described in Sec. 3.5. The speed of this step is determined by the ability of branch and bound to quickly find a good upper bound to Eq. (12), thereby allowing it to splice away exponentially sized chunks of the search space. As such, it is crucial to test the most promising hypotheses first, where object hypotheses are ordered according to the number of quadruples they contained. This approach was usually good enough to find an optimal set of nonoverlapping objects without recourse to some form of nonmaximal suppression. In our initial experiments, however, we found that the branch and bound step would occasionally run for hours on cluttered input images. Thus, we experimented with a simple mechanism that returned the best (suboptimal) result after 30 min, about double the median time for the exhaustive search, in order to assess its effect on accuracy. Table 2 shows the score for the testing corpus, with and without timeout. We see that when the timeout was not used, both runtime and performance (as measured by score) increase as more hypotheses are generated. There is little effect of timeout, except for when the number of input hypotheses is large. Under the given experimental conditions, 80 hypotheses with 30 min timeout gives near best performance for this method (), with median runtime 6.55 min, and runtime bounded to 30 min. Table 2F1 with and without timeout. Timeout means that the algorithm returned the best result after 30 min of computation. Optimal means that the branch and bound step ran to completion, giving the optimal result. The given runtimes are for the optimal condition. The timeout did affect the performance when the number of input hypotheses was large.
There is another way to speed-up the processing time. In our experiment, the scene contained images of multiple objects, each object occupying only a fraction of the camera image. It follows that the entire image could be divided into several smaller regions and our algorithm could then be applied to individual regions, one by one. Considering the NP-hard nature of our algorithm, the sum of processing times of smaller problems (regions) is likely to be less than the processing time of solving the entire problem (analyzing the entire image). What we are describing is the essence of a divide and concur approach that has been used in many applications in the past. In order to evaluate how well this approach would work in our application, we looked at our results separately for the scenes containing five objects, six objects, and so on. For five objects in the scene, 40 hypotheses led to precision with the median runtime 0.6 min and max runtime 1.3 min (see Table 3). Compare this to 10 objects in the scene. Ten objects required 320 hypotheses to produce , but the resulting median time was 31 min and max runtime almost 12 h. Clearly, detecting five objects at a time in a scene containing 10 objects would lead to substantially smaller runtime, compared to the case of detecting all 10 objects at once. This observation is not surprising, but it does suggest that our algorithm could use what is referred to in human vision literature as visual attention.42 Directing visual attention toward particular regions in the image requires additional computational tools, such as saliency measures. There are a number of saliency measures in the literature, as well as models of visual search using eye movements. Our future work will examine these aspects of vision with the purpose of bringing our model of FGO closer to real-time performance—the kind of performance that characterizes human vision. Table 3F1 and runtime as a function of the number of objects in a scene, for 40 and 320 input hypotheses, and with branch and bound running until completion. We see that runtime is much faster for fewer objects, suggesting that overall performance can be improved by adopting a divide and conquer approach.
5.Conclusions and Future WorkOur results suggest that the biologically motivated symmetry prior is useful in FGO (object localization). In a sense, these results are not surprising because our new method is based on a straightforward rational argument, namely, that 3-D symmetries uniquely identify 3-D objects. Intuitively, this argument makes a lot of sense, and insofar as there is a method for detecting 3-D symmetries in a scene then the resulting FGO should be reliable. Our results support this claim; however, we believe that progress can be made by improving the front end of our model, where 3-D symmetry is detected. A few suggestions for future research are listed below. First, this experiment uses a rudimentary definition of shape: Definition 2.1. If an object’s symmetries provide the informed prior that makes accurate FGO possible, then it stands to reason that a richer definition of an object’s symmetries would produce even better results. In particular, individual object hypotheses would become more constrained, and more likely to appeal to the human intuition for shape. This, in turn, would prune the search space that the branch and bound step must traverse to find the optimal set of nonoverlapping objects, thus improving the speed of the algorithm as well. Any heuristical method for finding nonoverlapping objects should also benefit from a richer definition of shape as well. Second, humans are able to solve the 3-D symmetry correspondence problem from single 2-D images, but how this occurs is currently a topic of active research.43 Solving for object localization from single images would widen the practical applications of this approach. This is especially so for uncalibrated cameras, since a 3-D aware approach to object localization could be used in general image databases, presenting a significant advance over the state of the art. Third, the procedure presented was designed and tested on mostly polyhedral objects, but this approach should be extended to smoothly curved surfaces. Polyhedral objects tend to have well-defined edges in the binary edge maps produced by the canny operator. Importantly, these edges are sufficient for recovering the symmetry of the object. This simplifies the symmetry correspondence problem to search for pairs of points on a binary edge map; however, such an approach may not work well with smooth surfaces. Our results show that “round” structures, such as people, can be localized using symmetry applied to binary edgemaps; however, this is a preliminary result, and it is unknown, e.g., how well individual people can be localized in a crowd. Note that once FGO is solved, the individual objects can be used as a saliency map to direct the “attention” of further processing steps. The topic of saliency maps was started 30 years ago44 and remains an active field today. Symmetry-based FGO should be useful to researchers who are interested in finding relationships between objects, and building event models for scenes, which is sometimes considered part of the vision problem.42 In turn, higher level reasoning about a scene could disambiguate a symmetry-based FGO approach. For example, a symmetrical collection of tables and chairs in a classroom could be considered as one object or many, depending on how the information needs to be used by an event model for the scene. Thus, we are proposing that attention and saliency could work on two levels: as the front end to divide the image into subregions for solving FGO and later, after FGO is solved, to focus subsequent analyses on particular objects and groups of objects. This double status of attention may correspond to the “what” and “where” pathways in the human visual system.45 We believe that detecting and using 3-D symmetry is an essential step in visual processing, because psychophysical experiments have already shown that symmetry is a powerful prior used by the human vision system in a variety of unsolved vision applications, such as FGO, 3-D shape recovery, and shape constancy.6 Although the present work is preliminary, our experiment suggests an avenue toward bridging the divide between human and computer performance on object localization. AcknowledgmentsThis research was supported by the National Eye Institute of the National Institutes of Health under award number 1R01EY024666-01. The content of this paper is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health. We would like to thank the reviewers for their helpful feedback, and Vikrant Satheesh for annotating the testing corpus. ReferencesK. Koffka, Principles of Gestalt Psychology, London(2013). Google Scholar
E. Rubin, Synsoplevede Figurer (Visually Experienced Figures), Gyldendal, Copenhagen
(1915). Google Scholar
J. Wagemans et al.,
“A century of Gestalt psychology in visual perception: I. perceptual grouping and figure-ground organization,”
Psychol. Bull., 138
(6), 1172
–1217
(2012). http://dx.doi.org/10.1037/a0029333 PSBUAI 0033-2909 Google Scholar
J. Wagemans et al.,
“A century of Gestalt psychology in visual perception: II. conceptual and theoretical foundations,”
Psychol. Bull., 138
(6), 1218
–1252
(2012). http://dx.doi.org/10.1037/a0029334 PSBUAI 0033-2909 Google Scholar
T. Poggio, V. Torre and C. Koch,
“Computational vision and regularization theory,”
Nature, 317
(6035), 314
–319
(1985). http://dx.doi.org/10.1038/317314a0 Google Scholar
Z. Pizlo et al., Making a Machine That Sees Like Us, Oxford University Press, New York
(2014). Google Scholar
Y. Li et al.,
“A Bayesian model of binocular perception of 3D mirror symmetrical polyhedra,”
J. Vision, 11
(4), 11
(2011). http://dx.doi.org/10.1167/11.4.11 1534-7362 Google Scholar
Y. Li et al.,
“Symmetry is the sine qua non of shape,”
Shape Perception in Human and Computer Vision, 21
–40 Springer, London
(2013). Google Scholar
S. Levinson,
“Frames of reference and molyneuxs question: crosslinguistic evidence,”
Language and Space, 109
–169 MIT Press, Cambridge, Massachusetts
(1996). Google Scholar
L. Talmy, Toward a Cognitive Semantics, MIT press, Cambridge, Massachusetts
(2003). Google Scholar
E. Pecoits et al.,
“Bilaterian burrows and grazing behavior at 585 million years ago,”
Science, 336
(6089), 1693
–1696
(2012). http://dx.doi.org/10.1126/science.1216295 SCIEAS 0036-8075 Google Scholar
T. Sawada, Y. Li and Z. Pizlo,
“Shape perception,”
The Oxford Handbook of Computational and Mathematical Psychology, 255 Oxford University Press, New York
(2015). Google Scholar
D. Marr and H. Nishihara,
“Representation and recognition of the spatial organization of three-dimensional shapes,”
Proc. R. Soc. B: Biol. Sci., 200
(1140), 269
–294
(1978). http://dx.doi.org/10.1098/rspb.1978.0020 Google Scholar
T. Binford,
“Visual perception by computer,”
in IEEE Conf. on Systems and control,
262
(1971). Google Scholar
S. Carlsson,
“Symmetry in perspective,”
in Computer Vision—ECCV’98: 5th European Conf. on Computer Vision,
249
–263
(1998). Google Scholar
L. van Gool, T. Moons and M. Proesmans,
“Mirror and point symmetry under perspective skewing,”
in 1996 Conf. on Computer Vision and Pattern Recognition (CVPR ‘96),
285
–292
(1996). http://dx.doi.org/10.1109/CVPR.1996.517087 Google Scholar
W. Hong et al.,
“On symmetry and multiple-view geometry: structure, pose, and calibration from a single image,”
Int. J. Comput. Vision, 60
(3), 241
–265
(2004). http://dx.doi.org/10.1023/B:VISI.0000036837.76476.10 IJCVEQ 0920-5691 Google Scholar
G. Gordon,
“Shape from symmetry,”
Proc. SPIE, 1192 297
(1990). http://dx.doi.org/10.1117/12.969742 PSISDG 0277-786X Google Scholar
P. Cicconi and M. Kunt,
“Symmetry-based image segmentation,”
Proc. SPIE, 1977 378
(1993). http://dx.doi.org/10.1117/12.160482 PSISDG 0277-786X Google Scholar
D. Sharvit et al.,
“Symmetry-based indexing of image databases,”
J. Visual Commun. Image Represent., 9
(4), 366
–380
(1998). http://dx.doi.org/10.1006/jvci.1998.0396 JVCRE7 1047-3203 Google Scholar
S. Utcke and A. Zisserman,
“Projective reconstruction of surfaces of revolution,”
in Pattern Recognition,
265
–272
(2003). Google Scholar
C. Colombo, A. Bimbo and F. Pernici,
“Metric 3D reconstruction and texture acquisition of surfaces of revolution from a single uncalibrated view,”
IEEE Trans. Pattern Anal. Mach. Intell., 27
(1), 99
–114
(2005). http://dx.doi.org/10.1109/TPAMI.2005.14 ITPIDJ 0162-8828 Google Scholar
C. Phillips et al.,
“Grasping surfaces of revolution: simultaneous pose and shape recovery from two views,”
in IEEE Int. Conf. on Robotics and Automation (ICRA ‘15),
1352
–1359
(2015). http://dx.doi.org/10.1109/ICRA.2015.7139366 Google Scholar
T. Cham and R. Cipolla,
“Symmetry detection through local skewed symmetries,”
Image Vision Comput., 13
(5), 439
–450
(1995). http://dx.doi.org/10.1016/0262-8856(95)99731-F IVCODK 0262-8856 Google Scholar
S. Sinha, K. Ramnath and R. Szeliski,
“Detecting and reconstructing 3D mirror symmetric objects,”
in Computer Vision—ECCV’12: 12th European Conf. on Computer Vision,
586
–600
(2012). Google Scholar
K. Köser, C. Zach and M. Pollefeys,
“Dense 3D reconstruction of symmetric scenes from a single image,”
in Pattern Recognition,
266
–275
(2011). Google Scholar
S. Dickinson,
“Challenge of image abstraction,”
Object Categorization: Computer and Human Vision Perspectives, 1 Cambridge University Press, New York
(2009). Google Scholar
J. Sivic et al.,
“Discovering object categories in image collections,”
https://doi.org/http://dspace.mit.edu/bitstream/handle/1721.1/30525/MIT-CSAIL-TR-2005-012.pdf?sequence=2 Google Scholar
K. Grauman and T. Darrell,
“Unsupervised learning of categories from sets of partially matching image features,”
in 2006 IEEE Computer Society Conf. on Computer Vision and Pattern Recognition (CVPR ‘06),
19
–25
(2006). http://dx.doi.org/10.1109/CVPR.2006.322 Google Scholar
T. Deselaers, B. Alexe and V. Ferrari,
“Localizing objects while learning their appearance,”
in Computer Vision—ECCV’10 11th European Conf. on Computer Vision,
452
–466
(2010). Google Scholar
A. Faktor and M. Irani,
“‘Clustering by composition’—unsupervised discovery of image categories,”
in Computer Vision—ECCV’12 12th European Conf. on Computer Vision,
474
–487
(2012). Google Scholar
M. Cho et al.,
“Unsupervised object discovery and localization in the wild: Part-based matching with bottom-up region proposals,”
in 2015 IEEE Computer Society Conf. on Computer Vision and Pattern Recognition (CVPR'15),
–12011210
(2015). Google Scholar
G. Kim and A. Torralba,
“Unsupervised detection of regions of interest using iterative link analysis,”
in Advances in Neural Information Processing Systems,
961
–969
(2009). Google Scholar
A. Jain,
“Data clustering: 50 years beyond k-means,”
Pattern Recognit. Lett., 31
(8), 651
–666
(2010). http://dx.doi.org/10.1016/j.patrec.2009.09.011 PRLEDG 0167-8655 Google Scholar
C. Rothwell et al.,
“Extracting projective structure from single perspective views of 3D point sets,”
in Fourth Int. Conf. on Computer Vision (ICCV ’93),
573
–582
(1993). http://dx.doi.org/10.1109/ICCV.1993.378159 Google Scholar
R. Hartley and A. Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, Cambridge
(2003). Google Scholar
Y. Li et al.,
“A tutorial explaining a machine vision model that emulates human performance when it recovers natural 3D scenes from 2D images,”
J. Math. Psychol., 56
(4), 217
–231
(2012). http://dx.doi.org/10.1016/j.jmp.2012.07.001 JMTPAJ 0022-2496 Google Scholar
D. Olsson and L. Nelson,
“The Nelder–Mead simplex procedure for function minimization,”
Technometrics, 17
(1), 45
–51
(1975). http://dx.doi.org/10.1080/00401706.1975.10489269 TCMTA2 0040-1706 Google Scholar
A. Land and A. Doig,
“An automatic method of solving discrete programming problems,”
Econometrica, 28 497
–520
(1960). http://dx.doi.org/10.2307/1910129 Google Scholar
T. Caliński and J. Harabasz,
“A dendrite method for cluster analysis,”
Comm. Stat. Theory Methods, 3
(1), 1
–27
(1974). http://dx.doi.org/10.1080/03610927408827101 Google Scholar
M. Everingham et al.,
“The pascal visual object classes (voc) challenge,”
Int. J. Comput. Vision, 88 303
–338
(2010). http://dx.doi.org/10.1007/s11263-009-0275-4 IJCVEQ 0920-5691 Google Scholar
J. K. Tsotsos, A Computational Perspective on Visual Attention, MIT Press, Cambridge, Massachusetts
(2011). Google Scholar
V. Jayadevan,
“3-D shape recovery from a single camera image,”
(2016). Google Scholar
C. Koch and S. Ullman,
“Shifts in selective visual attention: towards the underlying neural circuitry,”
Matters of Intelligence, 115
–141 Springer, Netherlands
(1987). Google Scholar
M. Mishkin, L. Ungerleider and K. Macko,
“Object vision and spatial vision: two cortical pathways,”
Trends Neurosci., 6 414
–417
(1983). http://dx.doi.org/10.1016/0166-2236(83)90190-X TNSCDR 0166-2236 Google Scholar
BiographyAaron Michaux received his BS degree in computer science from the University of Queensland in 2001, and his BA degree in psychology from Saint Thomas University in 2010. He is a PhD candidate in the Department of Electrical and Computer Engineering at Purdue University. He is the author of six journal papers. In his research, he takes a cognitive science approach to engineering questions in computer vision. He is a member of IEEE. Vijai Jayadevan received his bachelor’s degree from Cochin University in 2008 and his master’s degree from The University of Arizona in 2013, both in electrical engineering. He is currently working toward his PhD in electrical engineering at Purdue University. His research interests include computer vision, computer graphics, machine learning, and signal processing. He is a student member of IEEE. Edward Delp is currently the Charles William Harrison distinguished professor of electrical and computer engineering at Purdue University. His research interests include image analysis, computer vision, image and video compression, multimedia security, medical imaging, communication, and information theory. He is a Fellow of the IEEE, a Fellow of the SPIE, a Fellow of the Society for Imaging Science and Technology (IS&T), and a Fellow of the American Institute of Medical and Biological Engineering. Zygmunt Pizlo received his PhD in electronics in 1982 and his PhD in psychology in 1991. He is a professor of psychological sciences at Purdue University. His research focuses on 3-D vision with special emphasis on 3-D shape. He published two monographs on these subjects in 2008 and 2014. His broader interests include computational modeling of cognitive functions such as problem solving and motor control as well as image and video processing applications. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



